Создание векторной системы управления на контроллере 1986BE91T Миландр
Для создания векторной системы управления будем использовать готовые шаблоны, которые необходимо добавлять на поле набора MexBIOS Development Studio в описанном далее порядке.
Отладку и настройку системы управления будем производить в режиме моделирования, поэтому первым этапом создания СУ будет добавление модели, затем уже построение самой СУ.
Также будем использовать список констант: параметры двигателя, расчётные коэффициенты для векторной СУ, посчитанных ранее.
Примечание: По ходу работы если появляется суффикс _1 - значит что-то добавлено два раза. С _1 нужно удалить.
- Установить MexBIOS Development Studio.
- Установить библиотеку MDR32F9QX.
- Создать проект MDR32F9QX.
- Перейти на вкладу Models.
- Добавить константы _si_AD90L4Y3_kVt.
- В Models, на поле набора алгоритмов, добавить шаблон Alg_iqACIM_Model.
- Подключить его в линию с BACKGROUND.
- Перейдите в формулу IM MODEL.
- Откройте осциллограф SCOPE_wr.
- Запустите моделирование и получите такой график:

- Для дальнейших действий, в IM MODEL удалите следующую часть схемы:

Примечание: Не обращайте внимание на изчезновение привязки к TP_OUT. При дальнейшей работе со схемой связи восстановятся в процессе добаления других шаблонов.
- Перейти в MDR32F9QX.
- Добавить на поле набора алгоритмов Alg_SYSTICK.
- Добавить на поле набора алгоритмов Alg_IM_SCALAR.
- Добавить на поле набора алгоритмов Alg_Current_Speed_Loops
- Добавить на поле набора алгоритмов Alg_iqACIM_VoltControl
- Убедиться, что теги восстановились Ualpha Ubeta в MODELS\IM MODEL.
- Перейти в формулу Drivers.
- Добавить шаблон MDR32F9Qx_ADC.
- Добавить шаблон MDR32F9Qx_CAP_wr_Calc.
- Добавить шаблон MDR32F9Qx_Brake_Control.
- Добавить шаблон MDR32F9Qx_Enable_PWM.
- Добавить шаблон S_iqACIM_Irsm_iqMAG.
Примечание: Дискретный выводы: PA9 - управления тормозным резистором, PA12 - управление разрешением ШИМ и др. были выбраны для управления отладочной платой 1986BE91T силовой платой от ПЧ MBS FC-01.
- Перейти в формулу MAIN.
- Добавить S_iqACIM_GUI_Start.
- Перейти в главное поле набора и произвести соединения добавленных частей схемы:

- Перейти в формулу SCALAR
- Добавить S_iqACIM_SCALAR
- Сохранить проект.
- Заново открыть проект (кнопка Открыть, выбрать сохранённый файл проекта).
- Перейти в формулу MAIN.
- Нажать кнопку:
- Запустить моделирование.
- Изменять задание частоты в Гц в разделе Скалярное управление, Гц.
- Убедиться, что при задании 50 Гц скорость чуть меньше 1500 об/мин.
Векторная система управления
- Перейти в формулу Speed_Loop.
- Добавить шаблон S_iqACIM_CS_Speed_Loop_MDR32F9QX.
- Перейти в Current Loop
- S_iqACIM_CS_Current_Loop_MDR32F9QX.
- Сохранить проект.
- Заново открыть проект (кнопка Открыть, выбрать сохранённый файл проекта).
- Проверить работу Векторной СУ через пульт управления в формуле MAIN.
- Запустить моделирование.
- Переключить Режим управления на Векторное управление.
- Скорость в Об/мин после запуска должна установиться в заданную величину.
- Изменяйте задание, убедитесь, что скорость регулируется.
Добавление защит
- Перейти в Drivers.
- Удалить TP_OUT с именем hStop.
- На главное поле набора алгоритмов добавить Alg_iqACIM_Protect.
- Подключить формулу iqProtect сразу после блока SYSTICK.
- Перейти в формулу MAIN.
- Нажать кнопку Показать/скрыть блоки и линии, для отображения всех блоков и линий.
- Нажать - Ctrl+A , Del - удалить всё содержимое формулы MAIN.
- Добавить шаблон S_iqACIM_GUI_addProtect
- Сохранить схему.
- Заново открыть схему.
- Перейти в фомрулу MAIN и запустите моделирование:
- Убедитесь, что скалярная и векторная системы управления работают.
- Переключите в Скалярный режим управления.
- Задайте частоту 50 Гц.
- Нажмите кнопку Старт/Стоп.
- Произойдёт авария Превышение тока в фазе.
- Нажмите кнопку Сброс аварий.
- Измените задание на 5 Гц. Убедитесь, что модель двигателя запускается.
Добавление драйвера ШИМ
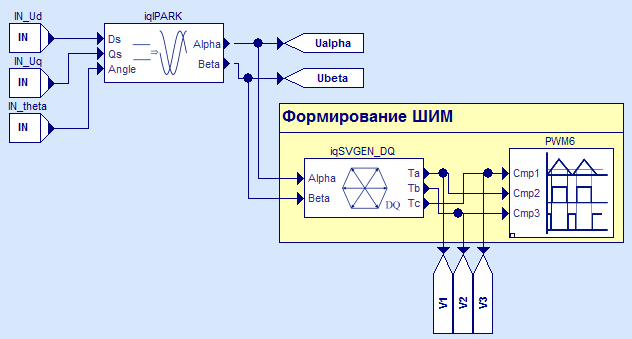
- Перейти в формулу iqVoltControl.
- Добавить шаблон MDR32F9Qx_PWM.
- Подключить:
Особенности векторной системы управления
Для режима отладки на ограничение выхода регулятора скорости было установлена на ±0.5 (двигатель будет развивать не максимальный момент).
Выходы регуляторов тока также ограничены ±0.5 (вектор напряжения не будет полностью использоваться).
Для контура тока можно изменить схему, включив подсистему iq_adaptiveUs, которая позволяет более эффективно использовать вектор напряжения. При этом ограничения регуляторов тока необходимо выставить ±1.0.
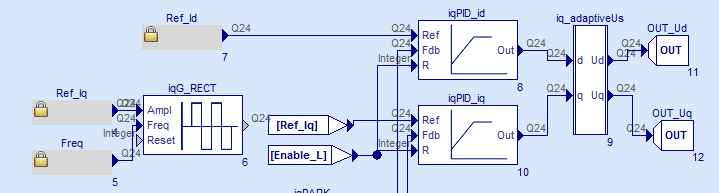
Использовать iq_adaptiveUs необходимо после проверки работы на макетном образце.
Ссылка на шаблоны: https://yadi.sk/d/VvacdHtpsLgBj